

¡Gracias por navegar
Gracias por leer.
Espero que os sea de utilidad para vuestro trabajo.
Estaría feliz si pudieras usar mi activo.Este es un modelo 3D de "Pingüino".
Puedes hacer que 28 poses básicas sean móviles.
Puedes rotar los huesos y posar libremente.
Inmediatamente después de la colocación:

Ejemplo de colocación de varias piezas y ajuste de las mismas con poses preestablecidas móviles:

Con el deslizador móvil (rotación de la rueda o arrastre hacia la izquierda y hacia la derecha),
Puedes cambiar a 28 poses básicas.


Dado que los huesos están incorporados, haga clic en el modelo de colocación y selecciónelo.
Seleccione la pieza y gire el anillo (o mueva el □),
Puedes ajustar la pose
Puedes ajustar la pose
Tenga en cuenta que si gira demasiado >, la forma y el patrón colapsarán (hasta unos 30 grados).

Ejemplo) Cree una pose con el preajuste móvil Jump3,
Si giras todo, se verá como una pose de natación (= pose de deslizamiento sobre hielo).


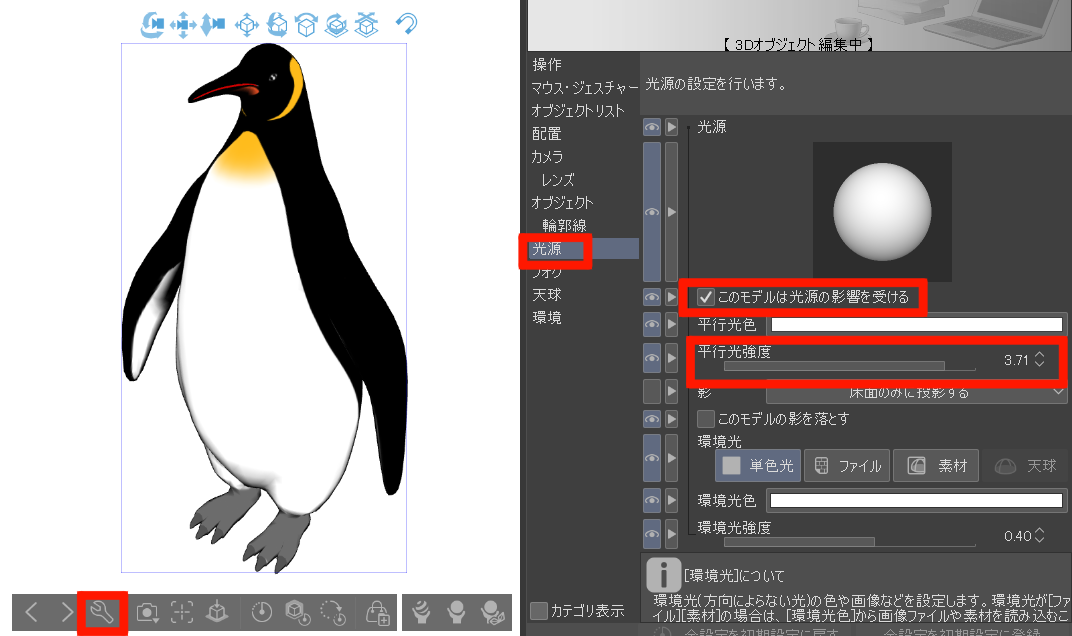
Configuración de la fuente de luz:
En el estado inmediatamente posterior a la colocación,
[Mostrar lista de objetos][Fuente de luz][Este modelo es aplicar fuente de luz]
Si lo marca, aumenta la intensidad de la luz paralela y ajusta la dirección de la fuente de luz, se dibujará de la siguiente manera
[Mostrar lista de objetos][Fuente de luz][Este modelo es aplicar fuente de luz]
Si lo marca, aumenta la intensidad de la luz paralela y ajusta la dirección de la fuente de luz, se dibujará de la siguiente manera

Continuando, si enciende [Lista de objetos] [Luz paralela 2] (= marca de pupila encendida)
El dibujo debe tener el siguiente aspecto
El dibujo debe tener el siguiente aspecto

Ejemplos de ajustes de gris:
En el estado inmediatamente posterior a la colocación,
Después de ejecutar [Capa] [rasterizar],
En [Capa][nueva capa de corrección][mapa de degradado],
El ajuste del control deslizante en el lado blanco debería tener un aspecto similar al del siguiente ejemplo

Muchas gracias
Gracias por leer siempre mis posts.
Si lo usas, estaré encantado
Estaría feliz si pudieras usar mi activo.
閲覧いただきありがとうございます
Thank you for reading.
作品作りにお役に立てれば嬉しく思います
I would be happy if you could use my asset.「ペンギン」の3Dモデルです。
可動で28個の基本ポーズを作れます。
ボーンを回転し、自由にポージングできます。
配置直後:
複数個を配置し、可動のプリセットポーズで調整した例:
可動のスライダー(ホイール回転か左右ドラッグ)で、
28パターンの基本ポーズに変更可能です
ボーンが組み込んであるので、配置モデルをクリック選択後、
パーツを選択してリングを回転(または□を移動)させ、
ポーズを微調整できます
ポーズを微調整できます
>回転しすぎると形状や模様が崩れますのでご注意ください(最大30度程度)
例)可動のプリセット Jump3でポーズを作り、
全体を回転させると遊泳ポーズ(=氷上を滑るポーズ)のようになります
光源設定:
配置直後の状態で、
[オブジェクトリストの表示][光源][このモデルは光源の影響を受ける]に
チェックを入れ、平行光強度を上げて、光源の方向を調整すると、以下のように描画されます
[オブジェクトリストの表示][光源][このモデルは光源の影響を受ける]に
チェックを入れ、平行光強度を上げて、光源の方向を調整すると、以下のように描画されます
さらに続けて、[オブジェクトリスト][平行光2]をオン(=瞳マークオン)にすると
以下のような描画になります
以下のような描画になります
グレースケール調整の例:
配置直後の状態で、
[レイヤー][ラスタライズ]を実行後、
[レイヤー][新規色調補正レイヤー][グラデーションマップ]で
白色側のスライダを調整すると以下の例のようになります
いつもありがとうございます
Thank you for always reading my posts.
お使いいただければ、うれしく思います
I would be happy if you could use my asset.
material マテリアル
-
Material por defecto 初期マテリアル

disposición 配置
-
Diseño predeterminado 初期レイアウト

ángulo アングル
-
Derecha 30 Right 30
-
Izquierda 30 Left 30
-
Frente Front
-
Izquierda 60 Left 60
-
Izquierda Left
-
Lateral izquierdo 45 LeftBack 45
-
Atrás Back
-
RgihtBack 45 RgihtBack 45
-
Derecha Right
-
Derecha 60 Right 60
-
Primer plano R 30 CloseUp R 30
-
Primer plano L 30 CloseUp L 30
-
Primer plano Lback 30 CloseUp Lback 30
-
Primer plano Rback 30 CloseUp Rback 30














Piezas de pose 可動パーツ
-
Salud Salute
-
RightHandUp (Mano derecha) RightHandUp
-
Mano izquierda LeftHandUp
-
LRHandUp LRHandUp
-
RightElbowUp RightElbowUp
-
LeftElbowUp LeftElbowUp
-
LRElbowUp LRElbowUp
-
Brazos abiertos OpenArms
-
OpenArms 2 OpenArms 2
-
HeadRotationR HeadRotationR
-
HeadRotationL HeadRotationL
-
Patada a la derecha RightKick
-
Patada izquierda LeftKick
-
Patada trasera derecha RightBackKick
-
Patada trasera izquierda LeftBackKick
-
Paseo 1 Walk 1
-
Paseo 2 Walk 2
-
Caminata 3 Walk 3
-
Caminata 4 Walk 4
-
Sentarse Sit
-
Asiento2 Sit2
-
Salto 1 Jump 1
-
Salto 2 Jump 2
-
Salto 3 Jump 3
-
Salto 4 Jump 4
-
Salto 5 Jump 5
-
InclinadoA la izquierda LeaningLeft
-
Inclinándose a la derecha LeaningRight














































Más materiales de アルフェッカ





Materiales populares de Objetos 3D










Nuevos materiales











Insignias
-
 MVP ◆Estos usuarios han contribuido en gran medida a la gestión de la comunidad, al publicar multitud de útiles respuestas a las preguntas planteadas. Una vez cada tres meses, los MVP son seleccionados en base a los puntos obtenidos durante ese período y, en consecuencia, son reconocidos por su esfuerzo.
MVP ◆Estos usuarios han contribuido en gran medida a la gestión de la comunidad, al publicar multitud de útiles respuestas a las preguntas planteadas. Una vez cada tres meses, los MVP son seleccionados en base a los puntos obtenidos durante ese período y, en consecuencia, son reconocidos por su esfuerzo. -
 New Valuable Player (NVP) ◆Son las personas que más han contribuido a la comunidad después de los MVP. Este galardón se otorga según los puntos conseguidos a los usuarios que aún no han obtenido ningún premio MVP.
New Valuable Player (NVP) ◆Son las personas que más han contribuido a la comunidad después de los MVP. Este galardón se otorga según los puntos conseguidos a los usuarios que aún no han obtenido ningún premio MVP. -
 Especialista oficial ◆Elegidos de entre todos los MVP, quienes ya han demostrado ser de inestimable ayuda, esto es un testimonio de su excepcional apoyo para con la comunidad. Tras un minucioso escrutinio, son nombrados por Celsys para ocupar dicho cargo.Nota: Anteriormente denominados "evangelistas".
Especialista oficial ◆Elegidos de entre todos los MVP, quienes ya han demostrado ser de inestimable ayuda, esto es un testimonio de su excepcional apoyo para con la comunidad. Tras un minucioso escrutinio, son nombrados por Celsys para ocupar dicho cargo.Nota: Anteriormente denominados "evangelistas". -
 Moderador oficial de Celsys ◆Los moderadores son miembros del personal de Celsys que pueden comunicarse en japonés y otros idiomas. No son expertos en software o ilustración, por lo que no pueden responder directamente a las preguntas. Sin embargo, tratarán de asegurarse de que la comunicación entre usuarios de distintas lenguas sea tan fluida y comprensible como sea posible.
Moderador oficial de Celsys ◆Los moderadores son miembros del personal de Celsys que pueden comunicarse en japonés y otros idiomas. No son expertos en software o ilustración, por lo que no pueden responder directamente a las preguntas. Sin embargo, tratarán de asegurarse de que la comunicación entre usuarios de distintas lenguas sea tan fluida y comprensible como sea posible. -
 Cuenta oficial de CelsysCuenta oficial del administrador
Cuenta oficial de CelsysCuenta oficial del administrador